


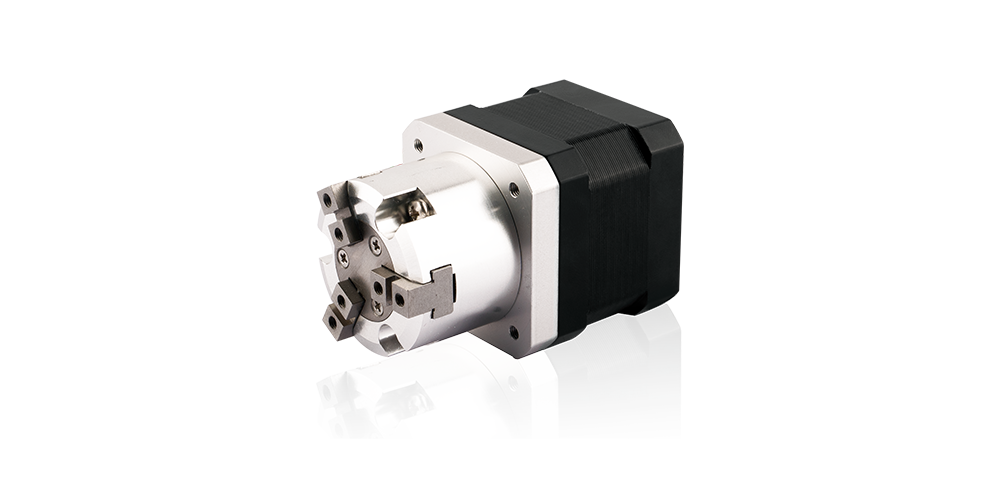
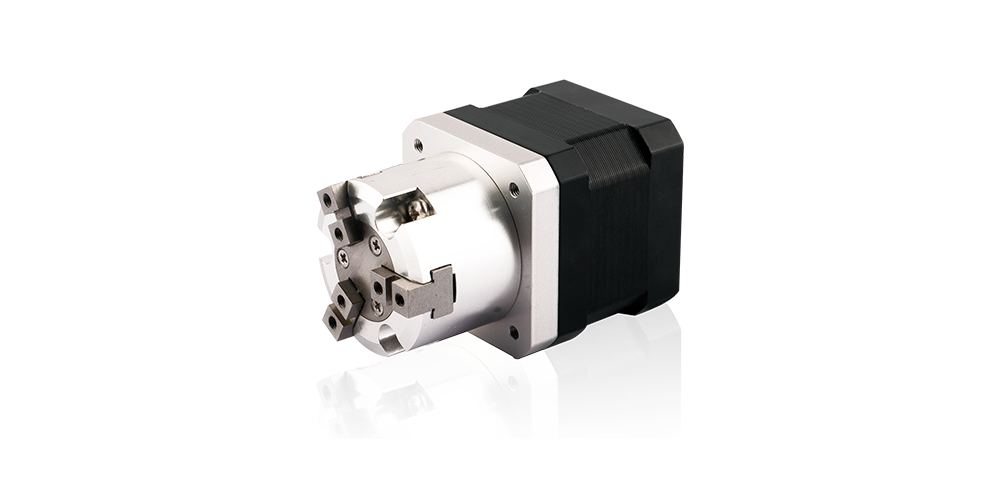
Ces actionneurs électriques de préhension appelés aussi actionneurs gripper sont utilisés dans les systèmes de manipulation robotique pour saisir et relâcher des objets. Leur conception vise à offrir un contrôle précis et calculé du mouvement aux pinces et aux doigts..
Ces actionneurs électrique de préhension sont notamment choisis dans les applications robotiques et industrielles, où la précision, la fiabilité et la flexibilité sont essentielles pour effectuer la tâche de préhension automatisée.
| Références | Tension (V) |
Courrant (A) |
Résistance (Ω) |
Inductance (mH) |
Nombre de fils | Longueur du moteur (mm) |
Info |
|---|



